I am looking for general solution of the form B=XAX^{-1} with the following constraints
Cormac Gilbert
Answered question
2022-02-17
where X is unknown matrix and A,B,X, are
The problem appears peculiar and thus I wish to simplify it further to more practical problem X is rotation matrix (R), and A is plane equation matrix, B is resulted homography in the sense of
where t is translation vector, n is plane normal vector, and d is signed distance, all three are known
My dirty solution so far is as follows : Finding the Jordan Canonical form:
and then X is obviously
but this works only if the canonical forms are the same, otherwise cannot be utilized for solution.
The second dirty trick is to solve a system of Linear equations in terms of
but i cannot figure out how to program this in the software (e.g. Matlab linsolve). Could you help me to clarify how to write system of linear equations in the shape of 9 rows?
The trick is how to notate them on the "right side" to use in ready to use functions for solving SLE.
Answer & Explanation
benehmenshgf
Beginner2022-02-18Added 7 answers
Case 2. A,B are orthogonally similar;
Proposition
It remains to obtain
Generically (randomly choose A), A is cyclic and
EDIT. A,B are orthogonally similar iff the couples (
If A,B are not orthog. similar, then the sole solution is X=0.
If A,B are orthog. similar, then, for a generic A, (S) admits a vector space of solutions of dimension 1:
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??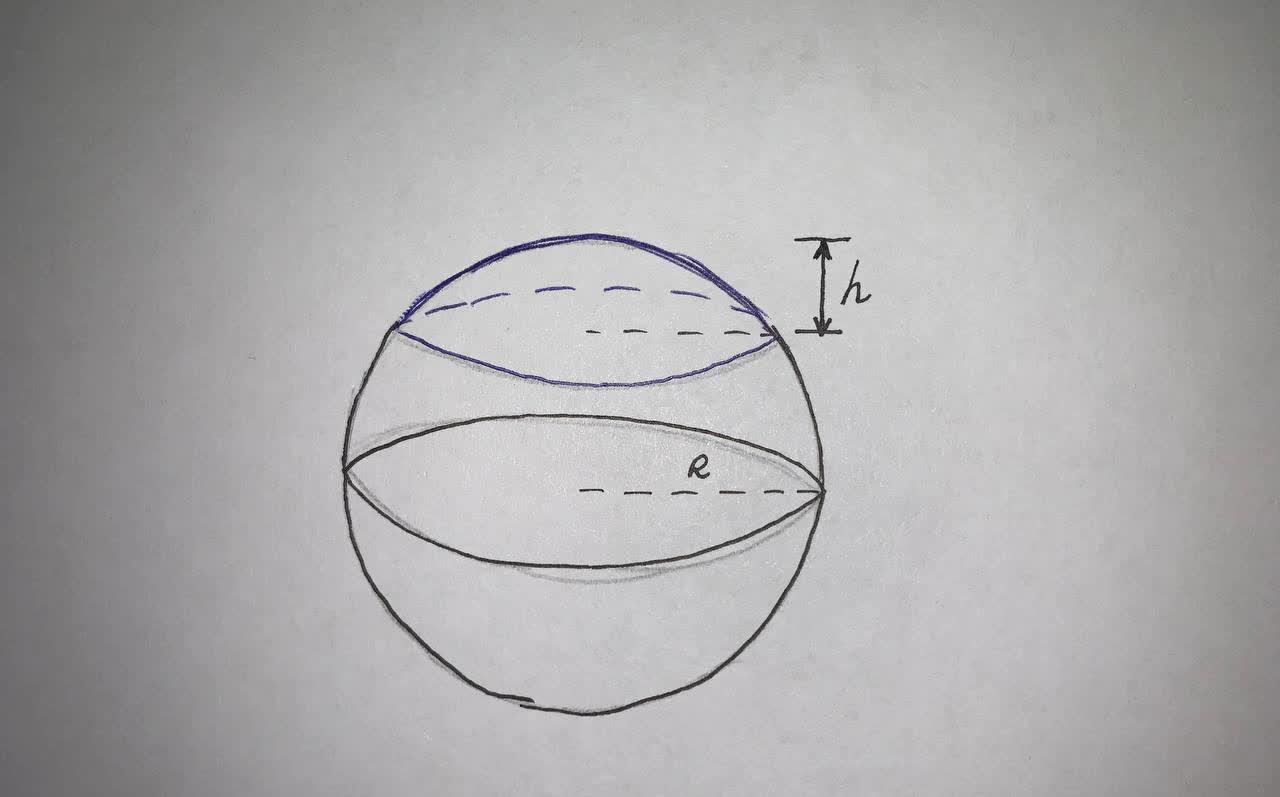
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.