Consider three time dependent points P_1(t), P_2(t) and P_3(t) in the plane(mathbb{R}^2), such that: (dP_1)/dt(t)=P_2(t)-P_3(t), (dP_2)/dt(t)=P_3(t)-P_1(t), (dP_3)/dt(t)=P_1(t)-P_2(t).
Melissa Walker
Answered question
2022-11-11
Consider three time dependent points , and in the plane (), such that:
This system should look like a triangle rotating but changing its shape.
Check if the images and they are an ellipse.
I have simulated this on my computer some time ago, and the trajectories seem to be one and the same ellipse. I don't know how to solve the differential equations to check it directly. However, I know for sure that the area of the triangle formed by the points is constant, since the points move along the base line.
Answer & Explanation
dilettato5t1
Beginner2022-11-12Added 25 answers
To avoid a proliferation of subscripts, I’m going to rename the points P, Q and R. The system of equations can be expressed in matrix form as .
It’s not terribly difficult to work out the solution to this system using the usual methods: the eigenvalues are 0 and , and so the coefficient matrix is similar to with exponential .
Step 2
A corresponding eigenbasis is easily computed (in fact one can find an orthonormal basis-the coefficient matrix is the “cross-product matrix” of ), and setting , the centroid of the initial configuration of points, gives for the general solution
Step 3
Now, set , and , the vertices of an equilateral triangle centered on the origin. The parametric equations of the three curves simplify to
which are all obviously parameterizations of the unit circle. Any other initial point configuration can be obtained from this one by an affine transformation, which also maps the three identical unit circles onto three identical ellipses.
With the above in mind, you could with a bit of tedious trigonometric manipulation verify that the three trajectories in the general solution are phase-shifted versions of each other, i.e., that , and , where .
New Questions in High school geometry
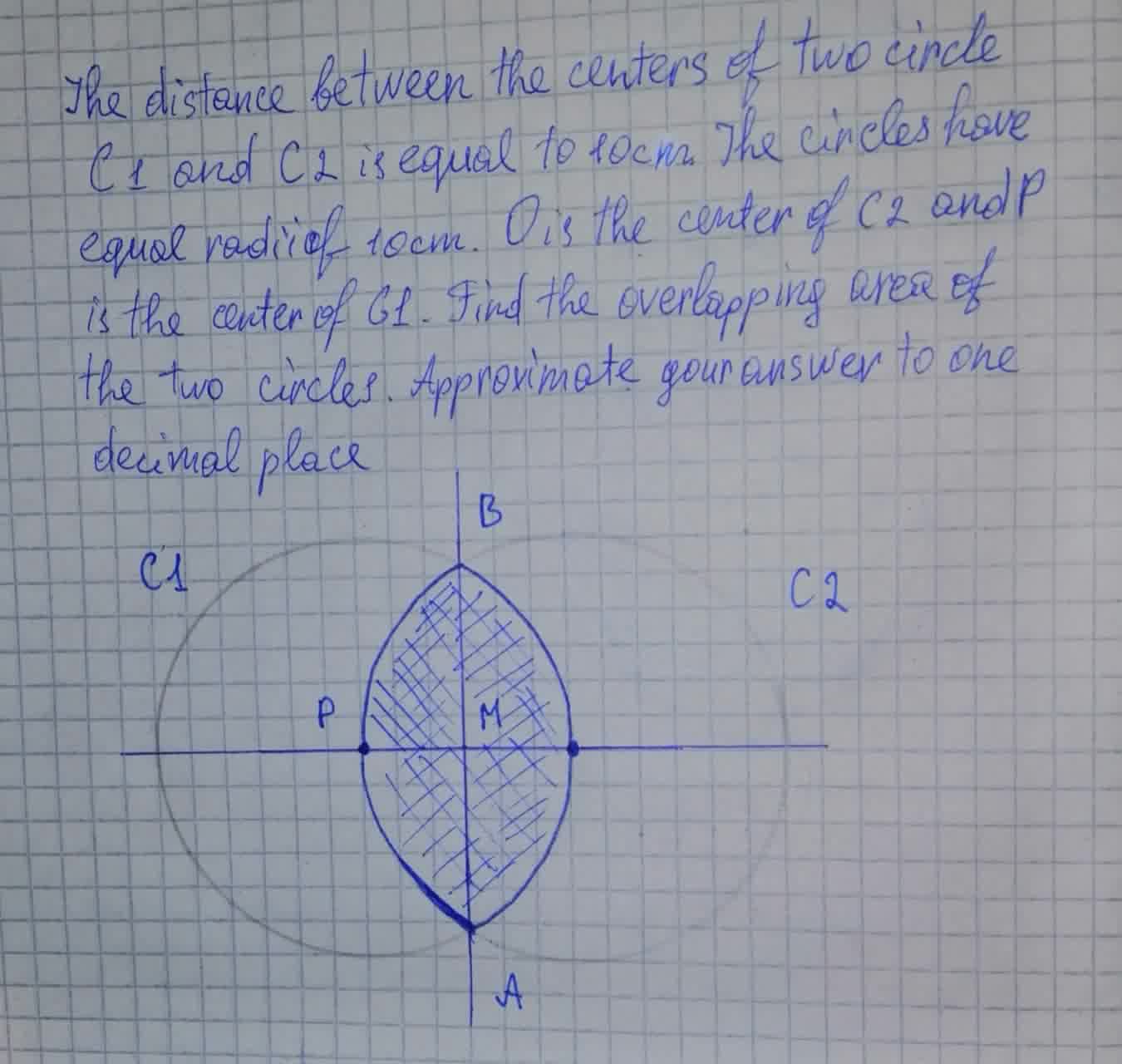
The distance between the centers of two circles C1 and C2 is equal to 10 cm. The circles have equal radii of 10 cm.
A part of circumference of a circle is called
A. Radius
B. Segment
C. Arc
D. SectorThe perimeter of a basketball court is 108 meters and the length is 6 meters longer than twice the width. What are the length and width?
What are the coordinates of the center and the length of the radius of the circle represented by the equation ?
Which of the following pairs of angles are supplementary?
128,62
113,47
154,36
108,72What is the surface area to volume ratio of a sphere?
An angle which measures 89 degrees is a/an _____.
right angle
acute angle
obtuse angle
straight angleHerman drew a 4 sided figure which had only one pair of parallel sides. What could this figure be?
Trapezium
Parallelogram
Square
RectangleWhich quadrilateral has: All sides equal, and opposite angles equal?
Trapezium
Rhombus
Kite
RectangleKaren says every equilateral triangle is acute. Is this true?
Find the number of lines of symmetry of a circle.
A. 0
B. 4
C. 2
D. InfiniteThe endpoints of a diameter of a circle are located at (5,9) and (11, 17). What is the equation of the circle?
What is the number of lines of symmetry in a scalene triangle?
A. 0
B. 1
C. 2
D. 3How many diagonals does a rectangle has?
A quadrilateral whose diagonals are unequal, perpendicular and bisect each other is called a.
A. rhombus
B. trapezium
C. parallelogram