The following system is given: <mover> x ˙<!-- ˙ --> </mover> = y
Emery Boone
Answered question
2022-05-24
The first thing I did was to find out the eigenvalues. I found out, that -1 is a doubled and 2 a single eigenvalue, so
In the excercises ago, the ideas were to determine . so I tried to do the following:
Is this step right? I tried to find a scheme as in the excercises ago and in the line x˙=y+z I don't have an x but one y and one z.
When inserting I have
which means that . Here is the point on which I don't know how to go on. One solution is the trivial one, so x=y=z=0. Can I use this solution?
I think that I have to use something like
in the case , but how to I get my u here exactly?
Answer & Explanation
Madisyn Avery
Beginner2022-05-25Added 12 answers
Note that , where , so it has one eigenvalue at 2 corresponding to the eigenvector , and two at -1 corresponding to the eigenspace . (Note that is symmetric hence has an orthonormal basis of eigenvectors.)
Hence if you write , where , you will have , and, in general, , from which we see that .
The projection of a point onto is straightforward to compute.
The point here is that you don't need to explicitly find eigenvectors for the eigenspace.
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??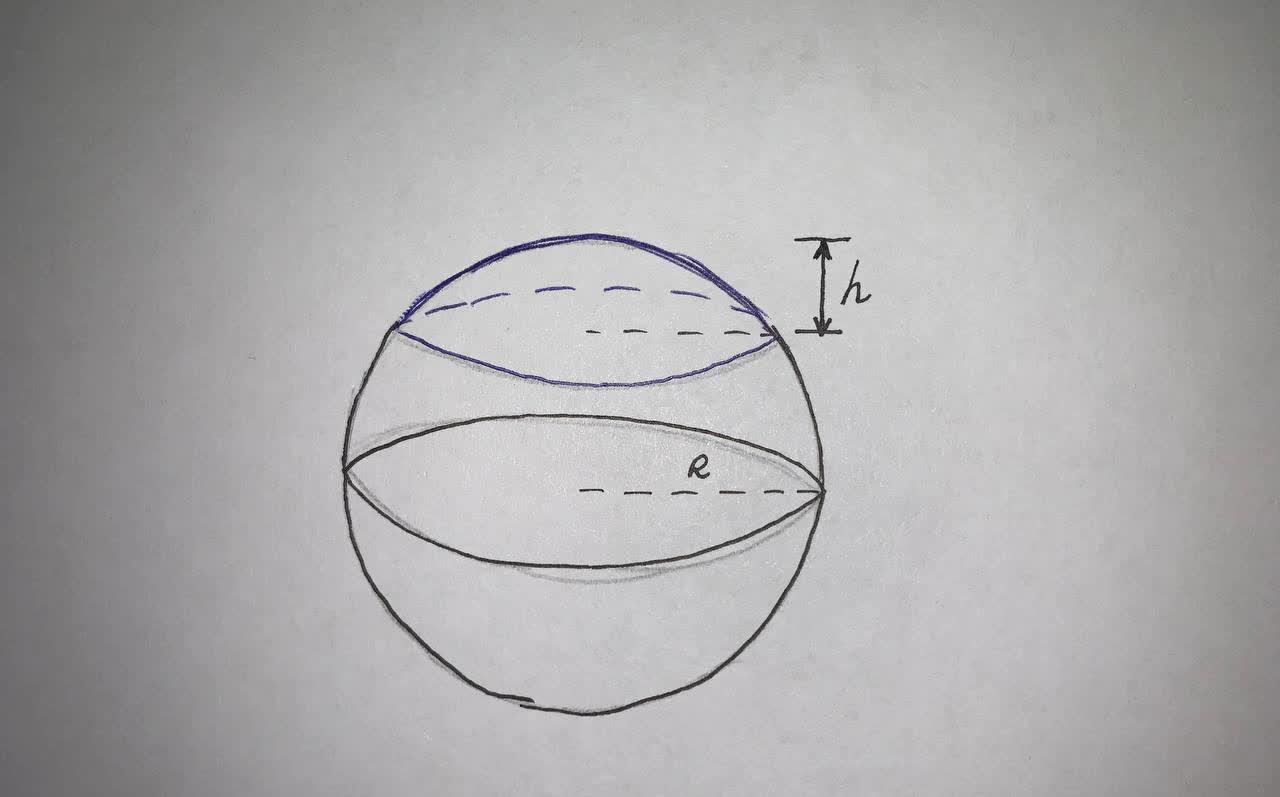
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.