Finding a Lyapunov function for modified quadratic form. I was hoping people might have some suggests on what types of equations to try. The system of n equations is given by: dotx=MD(x)Rx-g(x)
anraszbx
Answered question
2022-11-04
I am trying to construct a Lyapunov function to show global asymptotic stability for a somewhat difficult system of equations. I was hoping people might have some suggests on what types of equations to try. The system of n equations is given by:
where M is a symmetric matrix, is a diagonal matrix with on the diagonals, and g(x) is a positive-definite function that is linear in x. If M is the identity then this reduces to a standard quadratic form. But for M otherwise, I am unable to control this system. You can assume that M and R are full rank, and that M is positive definite.
I have been considering equations of the form:
such that:
for some matrix B. For example, if B is the identity matrix, then this gives:
But I am starting to think that this general form is not an appropriate form to work with, as I cannot make any progress. My idea is that B should be related to M and/or R, but no luck.
Are there any obvious things I am missing or alternate Lyapunov functions that I should explore?
Answer & Explanation
Emma Singleton
Beginner2022-11-05Added 11 answers
I assume you have linearized the system at a particular equilibrium point, which is the origin of your nonlinear differential equation. Note, that we only investigate the stability of equilibrium point of a nonlinear system and not the system as a whole.
If the linearized system is given by
Determine all the eigenvalues of A. By Lyapunov's indirect method we can distinguish three cases:
1. Case: All eigenvalues have a strictly negative real part. This implies that the equilibrium point of the nonlinear system is at least asymptotically stable.
2. Case: There exists at least one eigenvalue that has a strictly positive real part. This implies instability of the equilibrium point of the nonlinear system.
3. Case: All eigenvalues have a real part that is negative or equal to zero and there are eigenvalues with real part 0. This is the indecisive case by the indirect method.
Step 2
If you are in case one then you can invoke Lyapunov's converse theorems. This means that you can use the Lyapunov equation
in which P is a positive definite symmetric matrix and Q is a positive definite matrix. Often Q is chosen as the identity matrix I. By Lyapunov's converse theorem it is guaranteed that there exists a unique P such that
is a Lyapunov function of the nonlinear system in a neighbourhood of the equilibrium point (which is shifted to the origin).
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??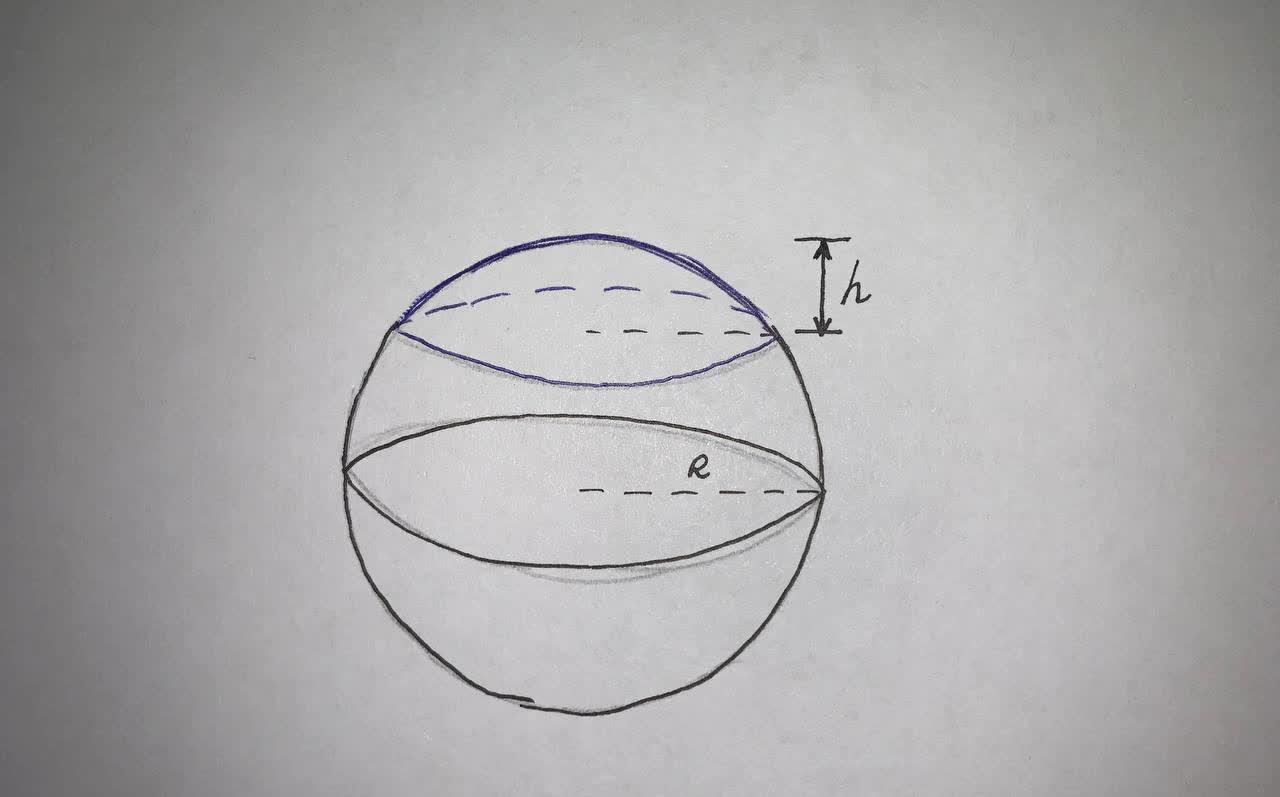
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.