Generalizing x^⊺ Ax=0 theorems to x^⊺A(x)x=0 forms?
akuzativo617
Answered question
2022-11-11
Let be any real vector and let be a real symmetric matrix. Then,
Can we still say this if is a real symmetric matrix-valued function of x? I.e.,
Also, is there a name for equations of the form with symmetric A? It is obviously not quadratic since A depends on x, but it still has a certain quadratic-form feel.
Answer & Explanation
Sean Sutton
Beginner2022-11-12Added 17 answers
Starting with what you already know
Imagine a vector . If , then either , or either y or x must be 0. So A must be the composition of a rotation by about some axis in any number of dimensions and any scaling. Just imagine the composition of an arbitrary number of Givens Rotations. We can impose more stringent requirements, but we won't bother.
A rotation other than the identity cannot be symmetric. A fine property of matrices representing rotations is that . If then which is not a rotation by about anything.
Step 2
Fine
So we've shown that A cannot spawn . Therefore, if then or . If for any then .
Let's ignore for a moment that A is a function of x. If we have any A, produced by a drawing from a hat,
Assume there is a function A(x) for which but . By the above, we are claiming that either:
1.
or
2,
We know that 1. must be false, because , so 2. must be true.
Brenda Jordan
Beginner2022-11-13Added 3 answers
Nevermind, found a counter-example. The matrix A just needs to have an eigenvector of x with eigenvalue 0, or put another way, x just has to be in the null-space of A. This is obvious to construct in 2D, but of course applies generally. Let,
Step 2
Find a vector orthogonal to x and call it v.
Construct the following matrix by outer-product,
This matrix is symmetric , is not the zero matrix, but still satisfies .
New Questions in Algebra I
Find the volume V of the described solid S
A cap of a sphere with radius r and height h.
V=??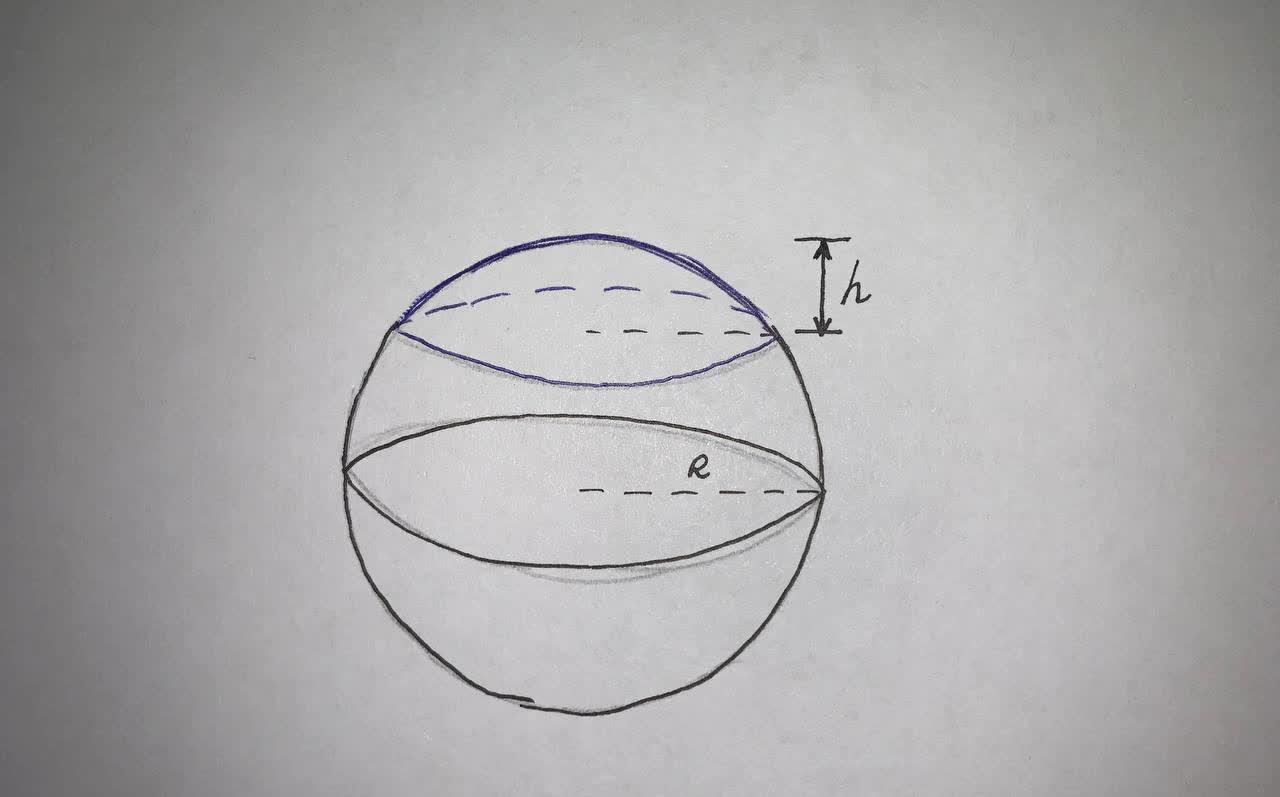
Whether each of these functions is a bijection from R to R.
a)
b)
c)
?In how many different orders can five runners finish a race if no ties are allowed???
State which of the following are linear functions?
a.
b.
c.
d.Three ounces of cinnamon costs $2.40. If there are 16 ounces in 1 pound, how much does cinnamon cost per pound?
A square is also a
A)Rhombus;
B)Parallelogram;
C)Kite;
D)none of theseWhat is the order of the numbers from least to greatest.
,
,
,
Write the numerical value of
Solve for y. 2y - 3 = 9
A)5;
B)4;
C)6;
D)3How to graph ?
How to graph using a table?
simplify
How to find the vertex of the parabola by completing the square ?
There are 60 minutes in an hour. How many minutes are there in a day (24 hours)?
Write 18 thousand in scientific notation.